
This autopilot system is an example of a custom robotics and control systems project. Designed and installed for the Roatan Institute of Deepsea Exploration on their flagship MUV, Idabel, the autopilot is capable of using a 3-axis magnetometer and GPS to follow a preset course at the surface or hold heading while submerged as deep as 2500 feet. The system is designed to use a basic PID loop to control the 4 forward thrusters as needed to maintain the required position. It uses an Arduino Mega 2650 and off-the-shelf electronics (magnetometer, gps unit, LED screen, opto-isolator, etc.) to keep cost low while maintaining a high level of functionality during proof-of-concept and development. All work from programming to machining custom pressure vessels was completed by OutsideInnovation reducing cost by limiting outsourced work. This system was intended as a proof of concept that would then be built out into a production quality system.
CONTROL SYSTEM AND ELECTRONICS DESIGN
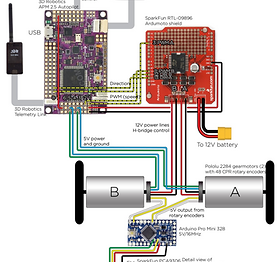
The control system and electronics for this project are based on the Arduino Mega 2650 platform. 3 axis magnetometer and GPS units from Analog Devices were spec'd and procured on appropriate breakout boards to provide the required sensor inputs. The control system uses a custom PID loop and potentiometer control software, but leverages the existing Arduino protocols when possible, especially for sensor integration and I2C communication. Sensors, LED screen, and motor control were commanded using I2C and SPI interfaces. The system was also built with room to expand capabilities to automatic hover, survey, surface patterns, and more. Currently auto-heading functionality is used most frequently due to its abilities at all operational depths.
ONBOARD CHALLENGES

Space and power are at a premium on any MUV and Idabel's small size, number of through hull fittings, and power constraints were no exception. These constraints effect everything in the design from the hardware to programming. Although the final package size for the autopilot was only the size of a few slices of bread, routing external components to the through hulls, internal wire harnesses, and mounting the user interface in an effectively required careful consideration and many hours of field work. Additional factors like the condensation inside the vessel under normal deep diving operation require mitigation to ensure signal integrity from the external sensors.
USER INTERFACE FOR HUMAN PILOTS

In a project like this it is easy to be distracted by the technical challenges of the control system and electronics design, but the end user in this case is of critical consideration. OutsideInnovation was careful to fully understand the pilot, the conditions on board the vessel, the environmental, and other external stimuli that the pilot must deal with on a day to day basis. With these factors in mind we worked hand in hand with the submersible pilots to ensure their needs were fully satisfied and that the autopilot was easy and reliable to use.
